
Heng (Alfredo) Zhang
heng.zhang@iit.it OR zhan6025@purdue.edu
I am currently a visiting scholar at MARS lab, Purdue University, fortunately working with professor Yu She since Fall 2025.
I am a third-year PhD student in Robotics and Intelligent Machines (DRIM) at Italian Institute of Technology (IIT), advised by Dr. Arash Ajoudani.
Previously, I received a Master's degree in Control Engineering from Tongji University and a B.E degree in Automation from Northeast Electric Power University, China.
My research envisions safe and generalizable robot learning for contact-rich robotic manipulation, which is crucial for physical interaction. I wish one day robots can safely and autonomously assist humans in various real-world scenarios, such as manufacturing, healthcare, laboratory and daily life!
Research Interests
My research focuses on robot learning, reinforcement learning. Specifically, My current research interest focuses on:"Contact is the heart of robotic manipulation. To understand manipulation, you must understand contact."
- · Learning-based methods for contact-rich robotic tasks, with a focus on safety issues including safe exploration and execution;
- · RL fine-tuning for safe VLA-driven contact manipulation (multimodal VLA including force-torque, vision, tactile, and language);
- · AI4Sci and Robot Scientists for laboratory automation.
Career Goals
Short-term:
- Complete PhD
- Apply for a postdoc
Long-term:
- To be a professor or:
- Co-found a robotics startup
Outreach
Inspired by Shuijing Liu: For junior PhD, Master's, and undergraduate students as well as potential collaborators, I offer a 30-minute mentorship session. I am especially available to support students from underrepresented groups or those in need. Topics include, but are not limited to, AI, robotics, AI4Sci research, graduate school applications, career development, and life advice. If you'd like to chat, please fill out this form to schedule a meeting.
Note: I do check my email every weekday and respond promptly. Please feel free to send a follow-up email if you haven't received a reply.
News
- Feb. 2026 Our work "aiXiv" was featured by 🎉Nature!🎉.
- Dec. 2025 Our paper was accepted by 🤖IJRR🤖.
- Dec. 2025 Our paper "aiXiv: A Next-Generation Open Access Ecosystem for Scientific Discovery Generated by AI Scientists" was featured by 🎉Science!🎉.
- Oct. 2025 Started Visiting Scholar at Purdue University
- Apr. 2025 this website was born.
- Jul. 2023 Started summer school at ETHz in learning-based control.
- Nov. 2022 Started PhD at iit in Robotics and Intelligent Machines (DRIM).
- Jun. 2022 Graduated from Tongji University with Master degree as an outstanding graduate 🎓.
Research
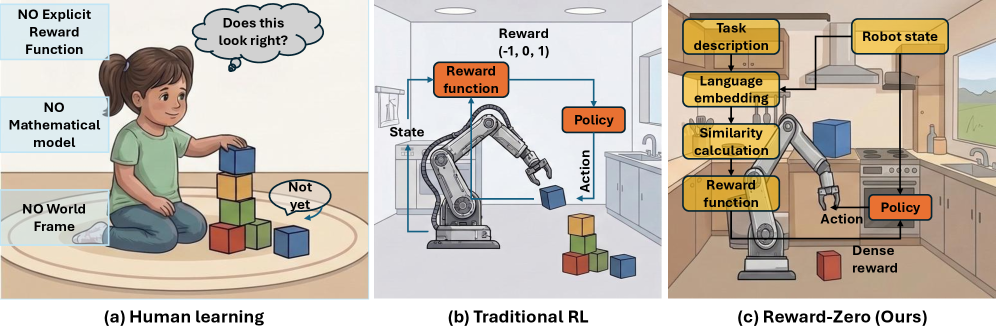
Reward-Zero: Language Embedding Driven Implicit Reward Mechanisms for Reinforcement Learning
Under Review, 2026
Reward-Zero serves as a simple yet sophisticated universal reward function that leverages language embeddings for efficient RL training.
Learning Tactile-Aware Quadrupedal Loco-Manipulation Policies
Under Review, 2026
Paper: Coming soon
A hierarchical training framework for learning tactile-aware quadrupedal loco-manipulation policies.

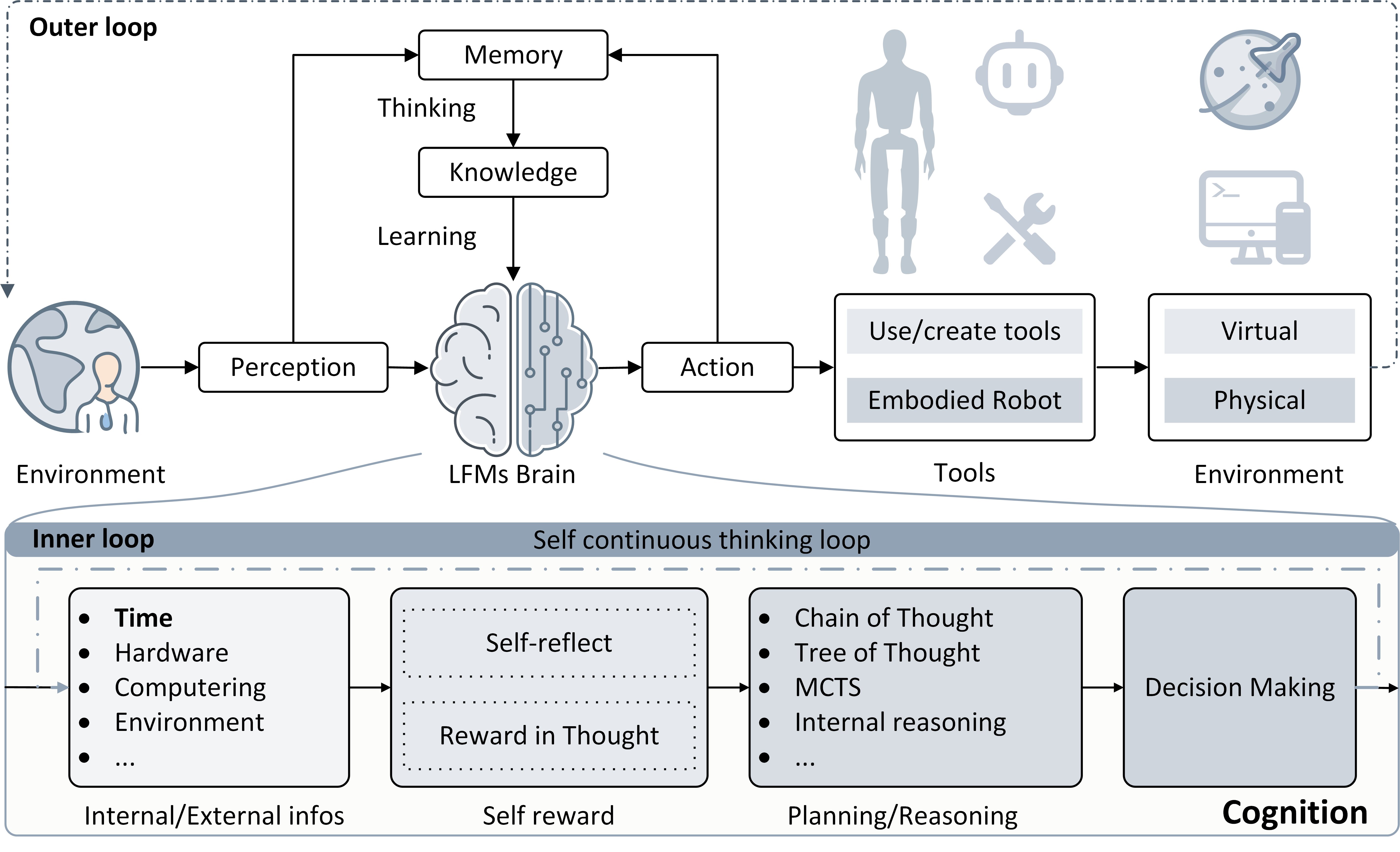
AgenticLab: A Real-World Robot Agent Platform that Can See, Think, and Act
Robotics: Science and Systems (RSS), 2026, under review
AgenticLab is an open-source model-agnostic robot agent platform and benchmark for open-world manipulation, provideing a closed-loop agent pipeline for perception, task decomposition, online verification, and replanning.
Self-supervised Physics-Informed Manipulation of Deformable Linear Objects with Non-negligible Dynamics
IEEE Transactions on Robotics (T-RO), 2026, under review
A self-supervised physics-informed framework for manipulating deformable linear objects (DLOs) with non-negligible dynamics, enabling robots to learn and adapt to the complex behaviors of DLOs in real-world scenarios.
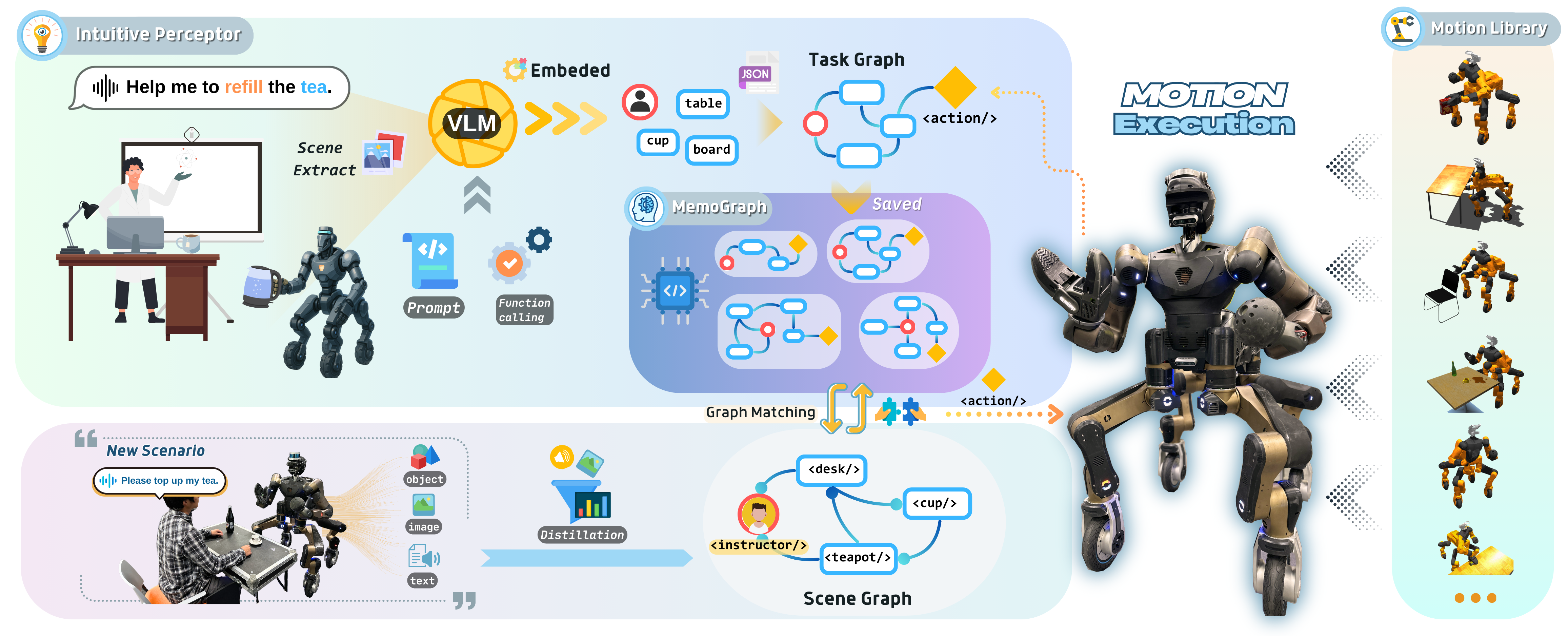
INTENTION: Inferring Tendencies of Humanoid Motion Through Physical Intuition and Grounded VLM
IEEE-RAS International Conference on Humanoid Robots, Seoul, Korea, 2025
INTENTION is a framework that combines physical intuition and grounded VLM to infer humanoid motion tendencies, enabling robots to predict and adapt to human actions in dynamic environments.
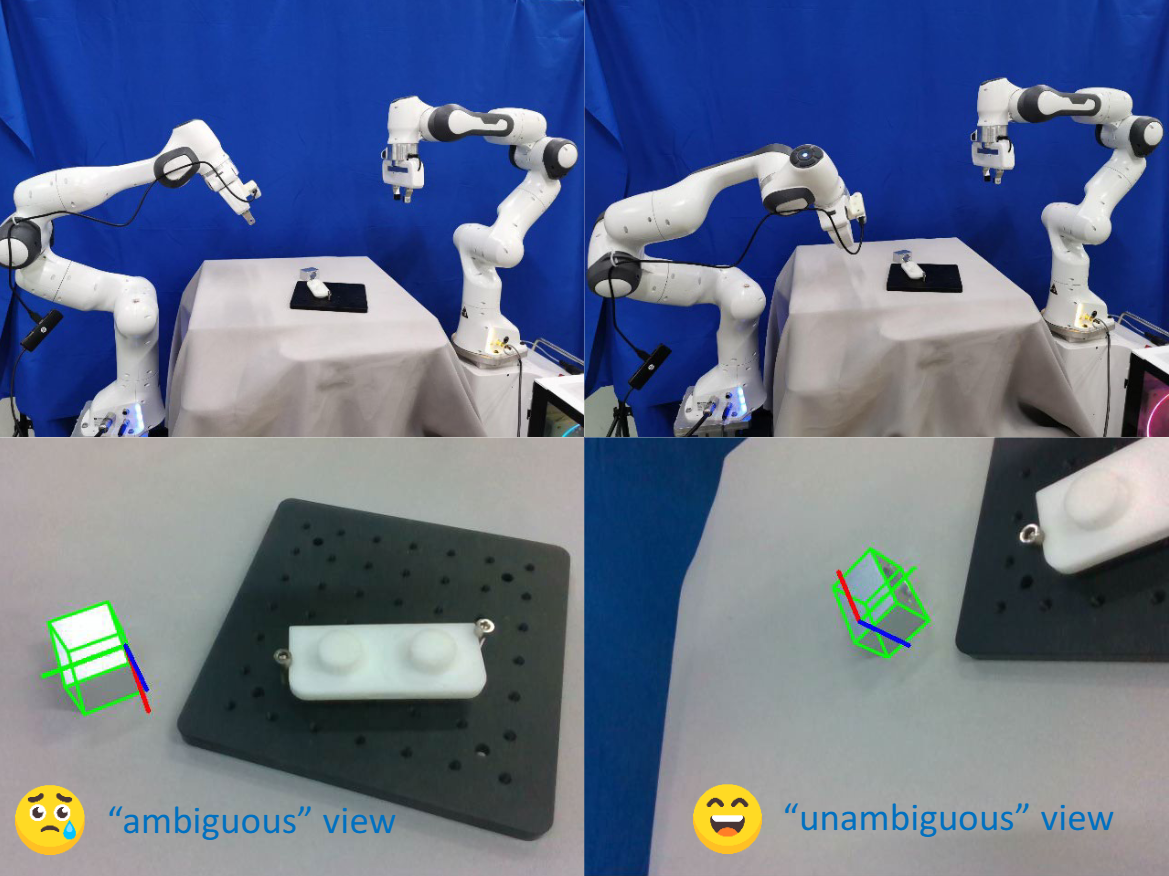
ActivePose: Active 6D Object Pose Estimation and Tracking for Robotic Manipulation
IEEE The International Conference on Robotics and Automation (ICRA), 2026, under review
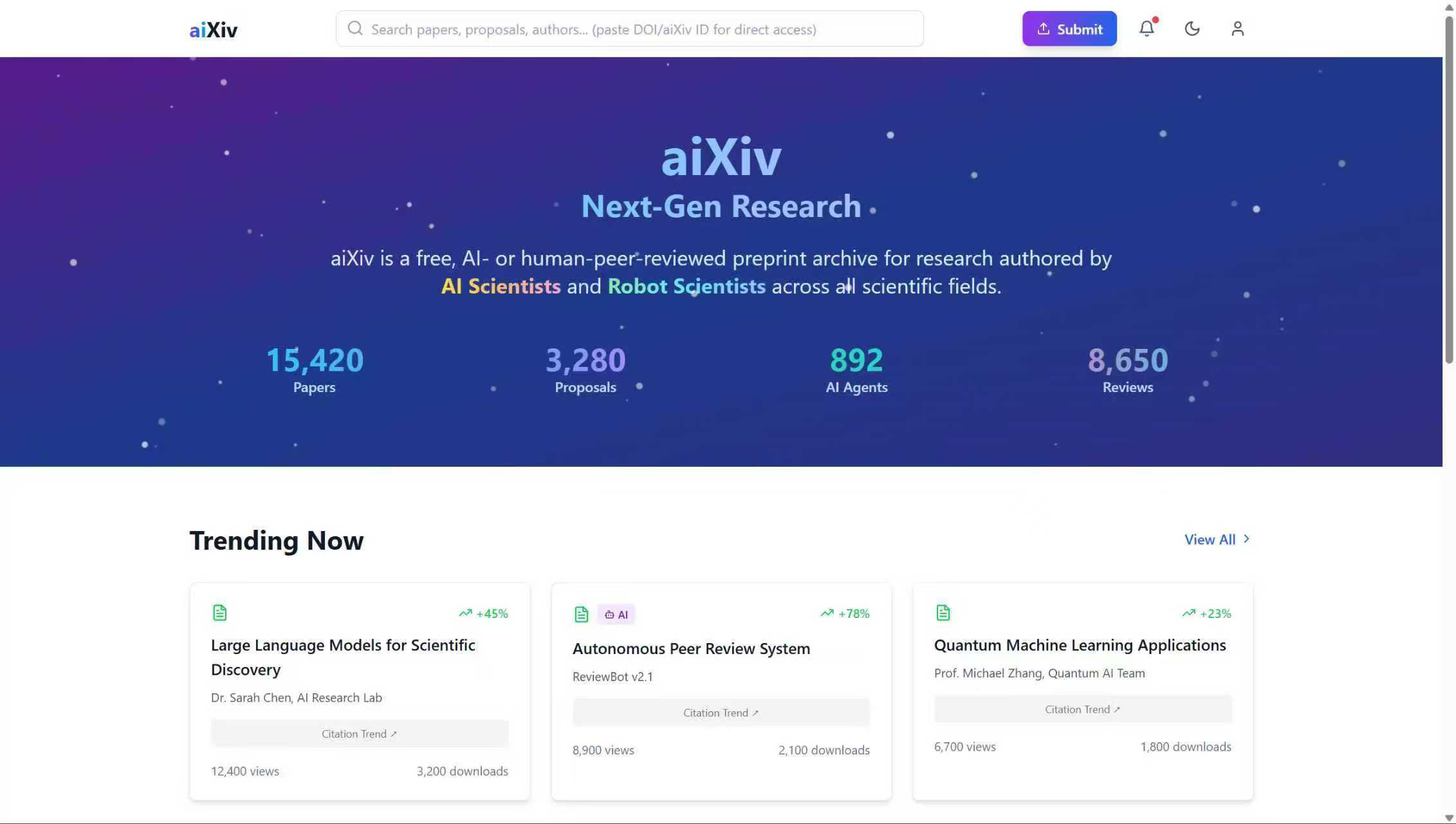
aiXiv: A Next-Generation Open Access Ecosystem for Scientific Discovery Generated by AI Scientists
The 40th Annual AAAI Conference on Artificial Intelligence, 2026, under review
aiXiv is a Preprint server for AI Scientists and Robot Scientists that leverages AI technologies to facilitate scientific discovery and collaboration among researchers.
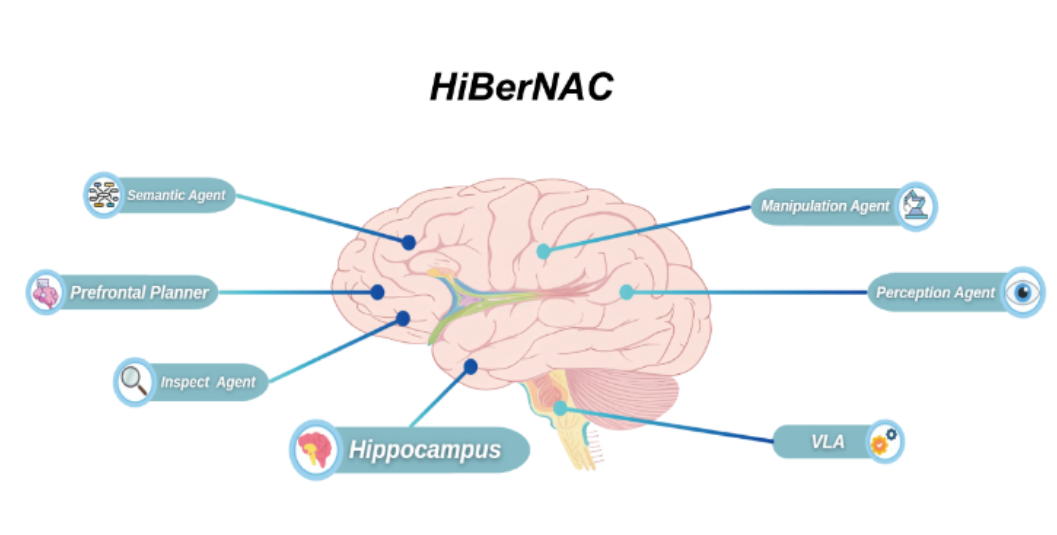
HiBerNAC: Hierarchical Brain-emulated Robotic Neural Agent Collective for Disentangling Complex Manipulation
under review
HiBerNAC: a Hierarchical Brain-emulated robotic Neural Agent Collective that combines: (1) multimodal VLA planning and reasoning with (2) neuro-inspired reflection and multi-agent mechanisms, specifically designed for complex robotic manipulation tasks.
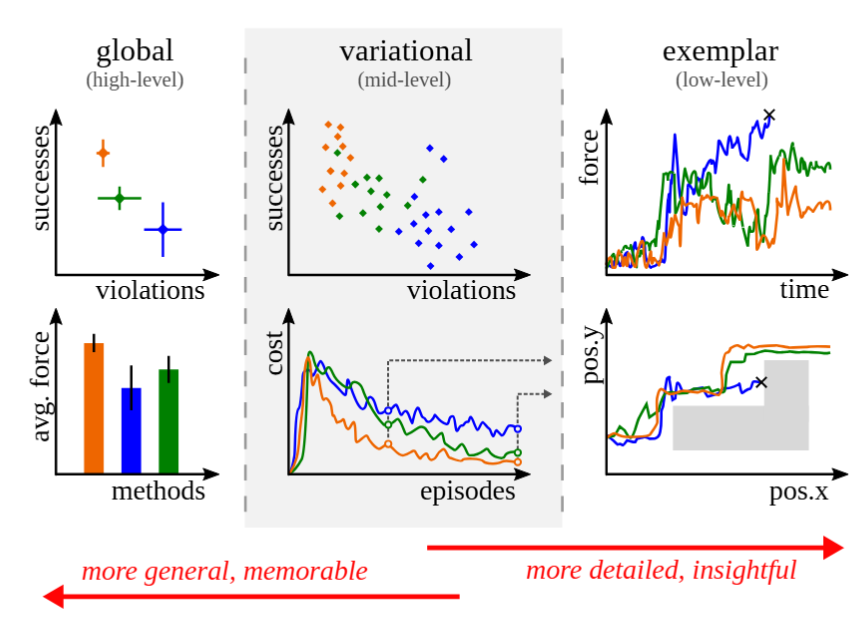
Towards Passive Safe Reinforcement Learning: A Comparative Study on Contact-rich Robotic Manipulation
IEEE Robotics and Automation Letters (RA-L) under review
Learning to be safe and stable both in training and deployment in real world.
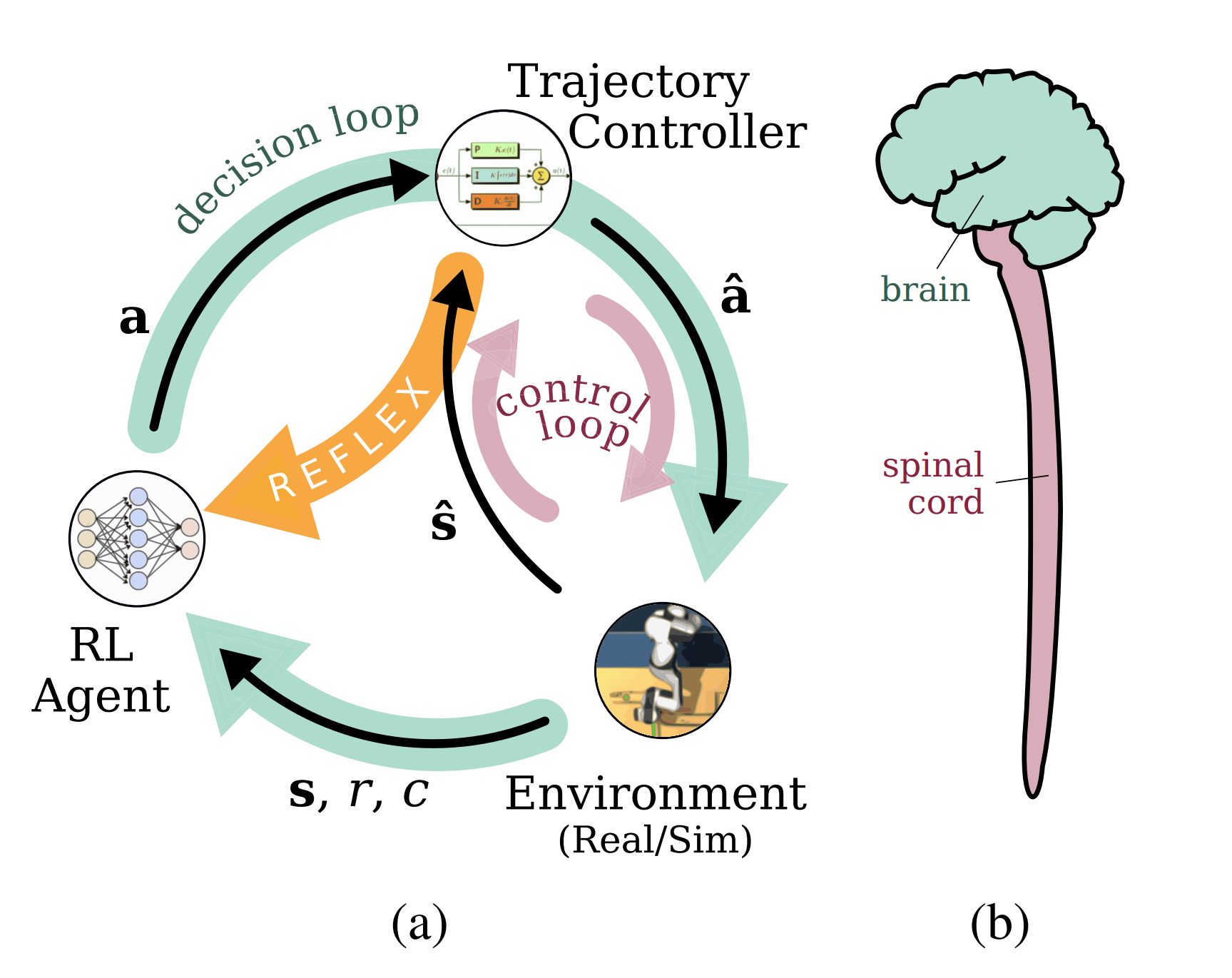
Bresa: Bio-inspired Reflexive Safe Reinforcement Learning for Contact-Rich Robotic Tasks
IEEE Robotics and Automation Letters (RA-L) under review
A Bio-inspired Reflexive Hierarchical Safe RL method inspired by biological reflexes operating at a higher frequency than the task solver.
Scaling Laws in Scientific Discovery with AI and Robot Scientists
Nature Machine Intelligence in submission
Autonomous Generalist Scientist (AGS) combines agentic AI and embodied robotics to automate the entire research lifecycle.
Safe Learning for Contact-Rich Robot Tasks: A Survey from classical Learning-Based Methods to Safe Foundation Models
Under review, IJRR, 2026
A comprehensive review of safe learning-based methods for robot contact-rich tasks.
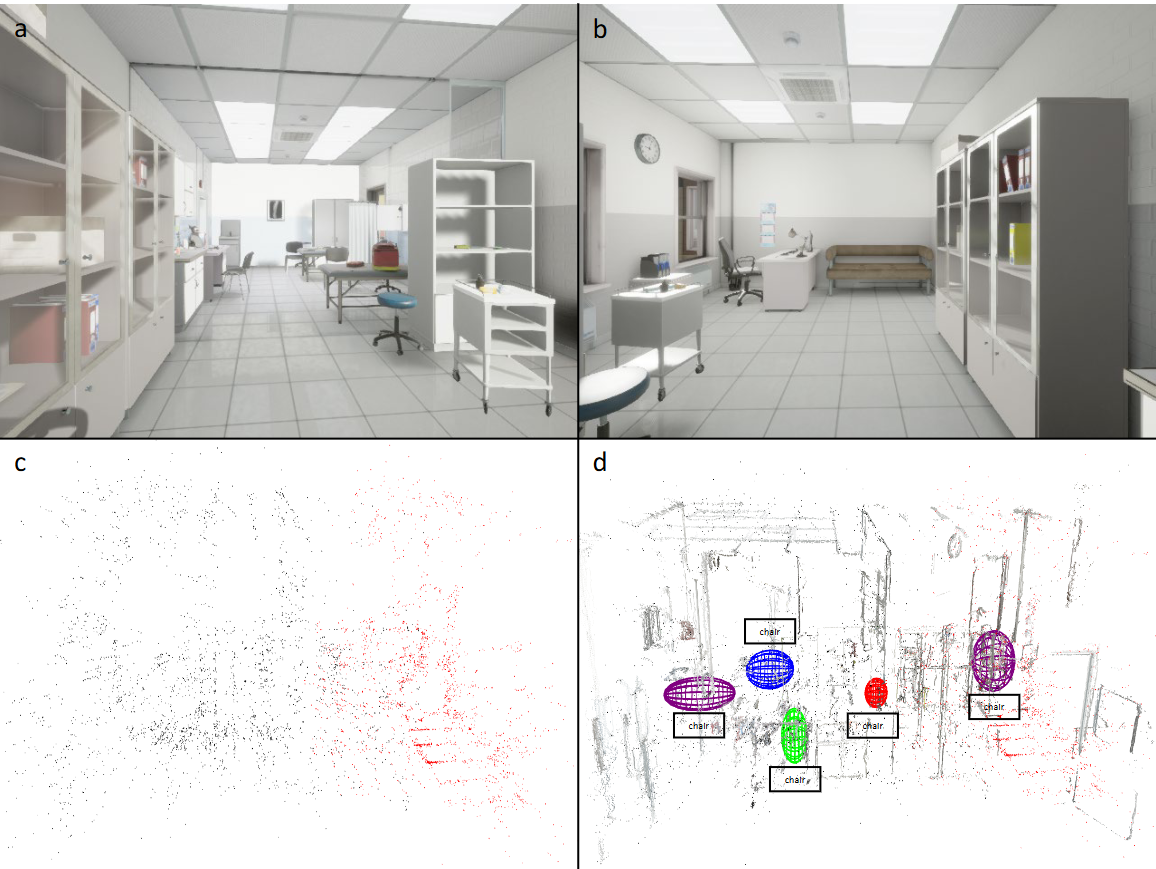
Semantic visual simultaneous localization and mapping: A survey
IEEE Transactions on Intelligent Transportation Systems, 2025
Semantic visual simultaneous localization and mapping (SVSLAM) is a crucial task in robotics and computer vision, aiming to simultaneously estimate the robot's location and map the environment using semantic information.
Service
- Editor: Associate Editor for IROS 2026
- Co-chair: of IROS 2025 1st Workshop on Embodied AI and Robotics for Future Scientific Discovery
- Organizer: Co-organizer of IROS 2025 1st Workshop on Embodied AI and Robotics for Future Scientific Discovery
- Reviewer: of IEEE TCDS, RA-L, RSS, AAAI, NeurIPS, ICRA, IROS, RO-MAN, CAC, etc. Mentor: Mentor for junior PhD, Master's, and undergraduate students as well as potential collaborators.